스텝모터를 사용하는 마우스나 라인트레이서 같은 경우 SLA7024 or SLA7026 이라는 스텝모터 드라이버를 많이 사용했다. 유니폴라 방식으로 진동이 적고 고속에 유리하다라고 했던것 같다.
그러나, 간단하게 만드는 것이 목표이므로 키트 형태로 구할수 있는 스텝모터 드라이버가 필요했고, L298N 을 사용하기로 한다.
보통 DC 모터 제어용으로 많이 사용하지만, 스텝모터 제어용도로도 사용가능하며, 4선으로 모터를 제어하므로 드라이버 한개당 DC 모터는 2개, 스텝모터는 1개가 제어가능하다.
위의 이미지에서 잘 보면 초록색 드라이버 중간에 흰색 부품(커넥터)이 있다. 이 초록색 드라이버에만 스텝모터 선을 바로 끼울수 있다.
사실 옆에 파란색 잭에 스텝모터 선의 피복을 벗겨서 연결하면 되지만, 스텝모터를 사용하기에는 초로색 드라이버가 훨씬 편리하다.
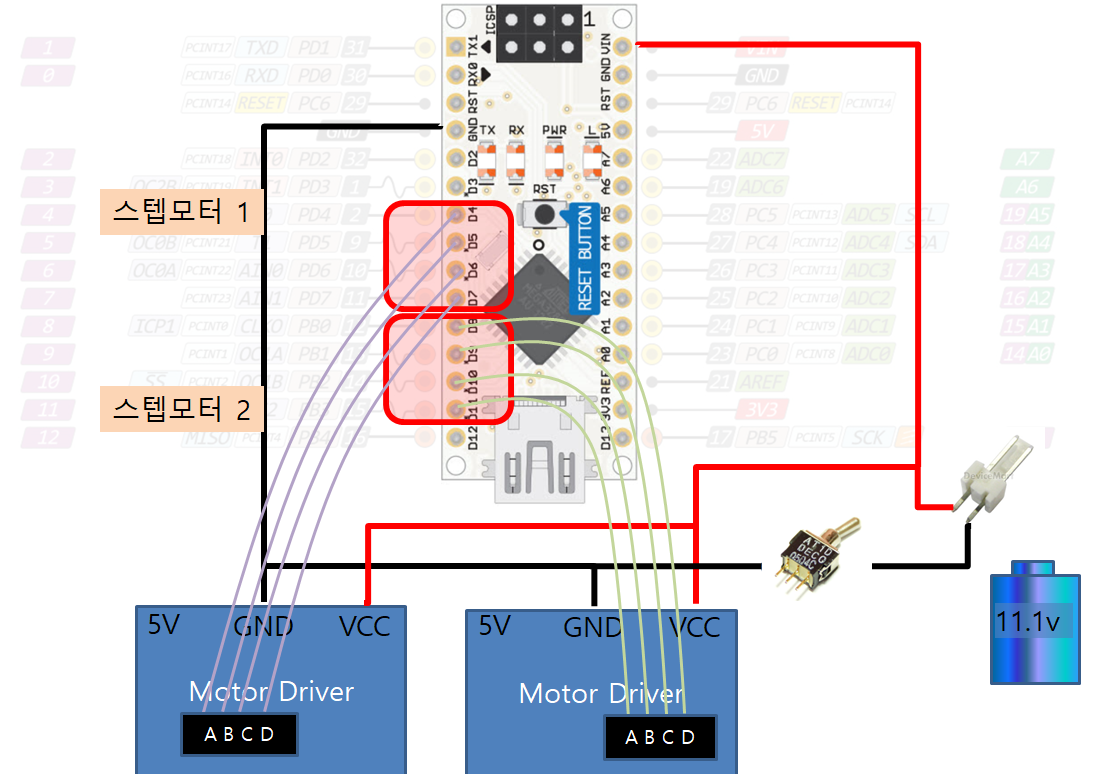
어쨋든 드라이버와 아두이노 나노를 아래 그림처럼 연결한다.
(스텝모터는 스텝 모터 드라이버와 따로 연결되어야함)
스텝모터는 일정 시간 간격으로 펄스를 출력하면 되는데, 이번에는 micros() 함수를 사용하여 시간을 저장하고, 지나간 시간을 측정하여 펄스를 변경하도록 했다. -> delay()함수를 사용하지 않는 폴링 방식
타이머 인터럽트를 사용할까 했으나, 속도가 느리므로 특별히 문제가 될게 없을 것으로 판단함
_03_step_sensor_test.ino
0.00MB
'로봇 만들기 - AVR > 마이크로 마우스' 카테고리의 다른 글
| DC Mouse 1. DC Motor 를 이용한 마이크로 마우스 제작 (0) | 2019.12.05 |
|---|---|
| 5. Mouse PCB 주문 (Fritzing) (0) | 2019.11.26 |
| Mouse 4. 몸체 조립하기 (0) | 2019.11.22 |
| Mouse 3. 적외선 거리 측정 센서 연결 (0) | 2019.11.17 |
| Mouse 1. 마이크로 마우스 제작 시작 (1) | 2019.11.17 |



